
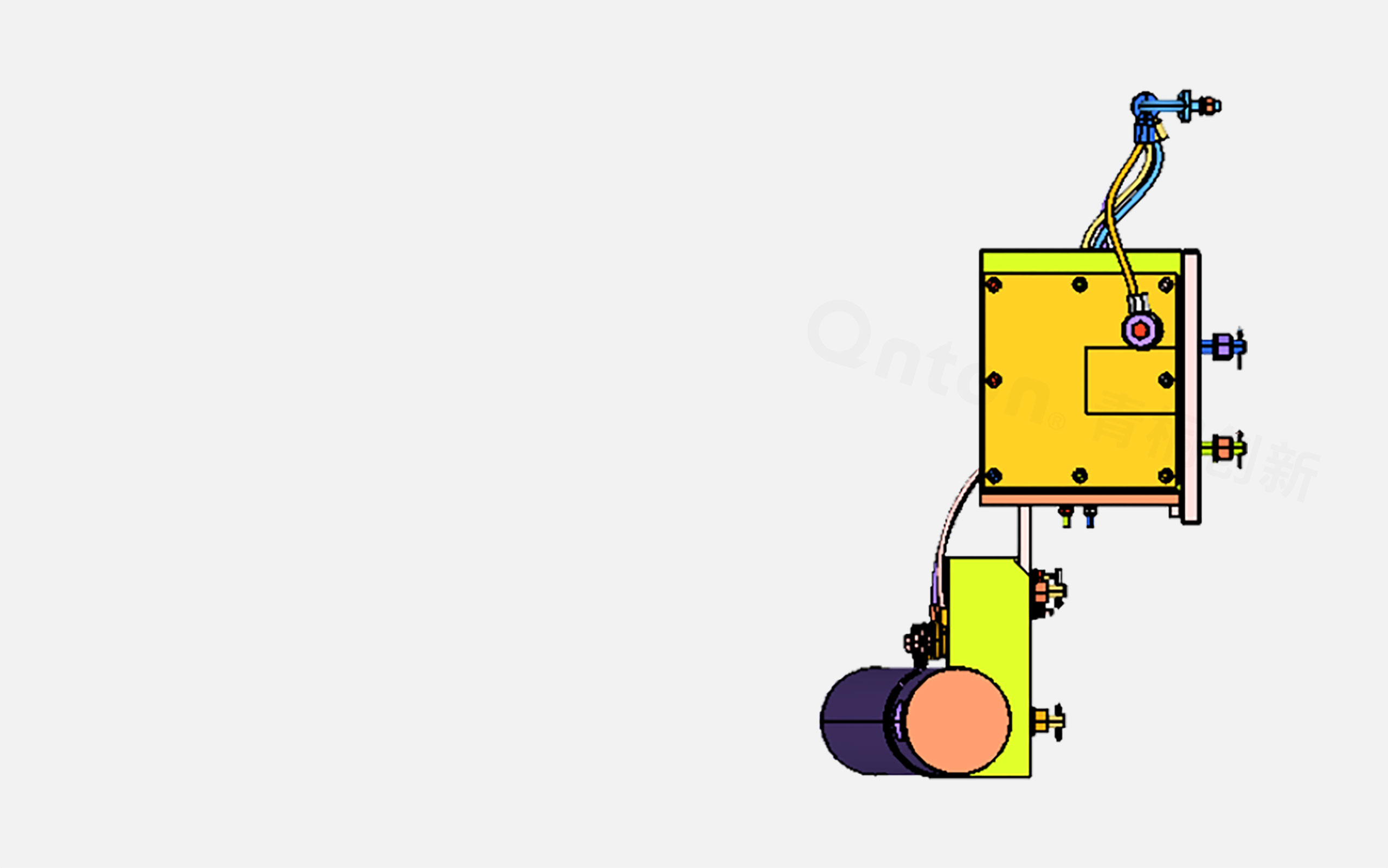
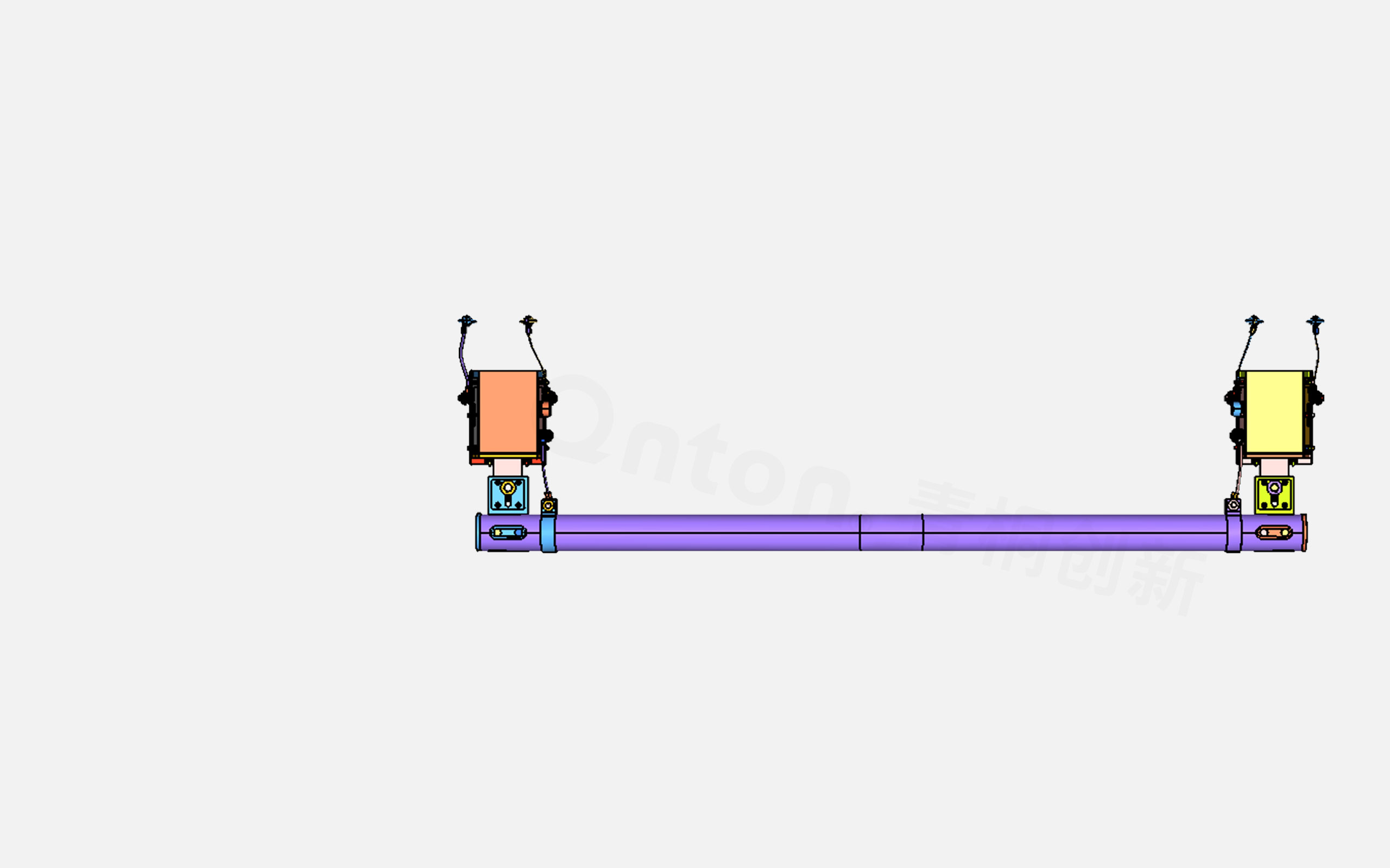
碰撞检测装置CAE仿真
客户:铁科时代 服务:CAE仿真
客户:铁科时代
服务:CAE仿真





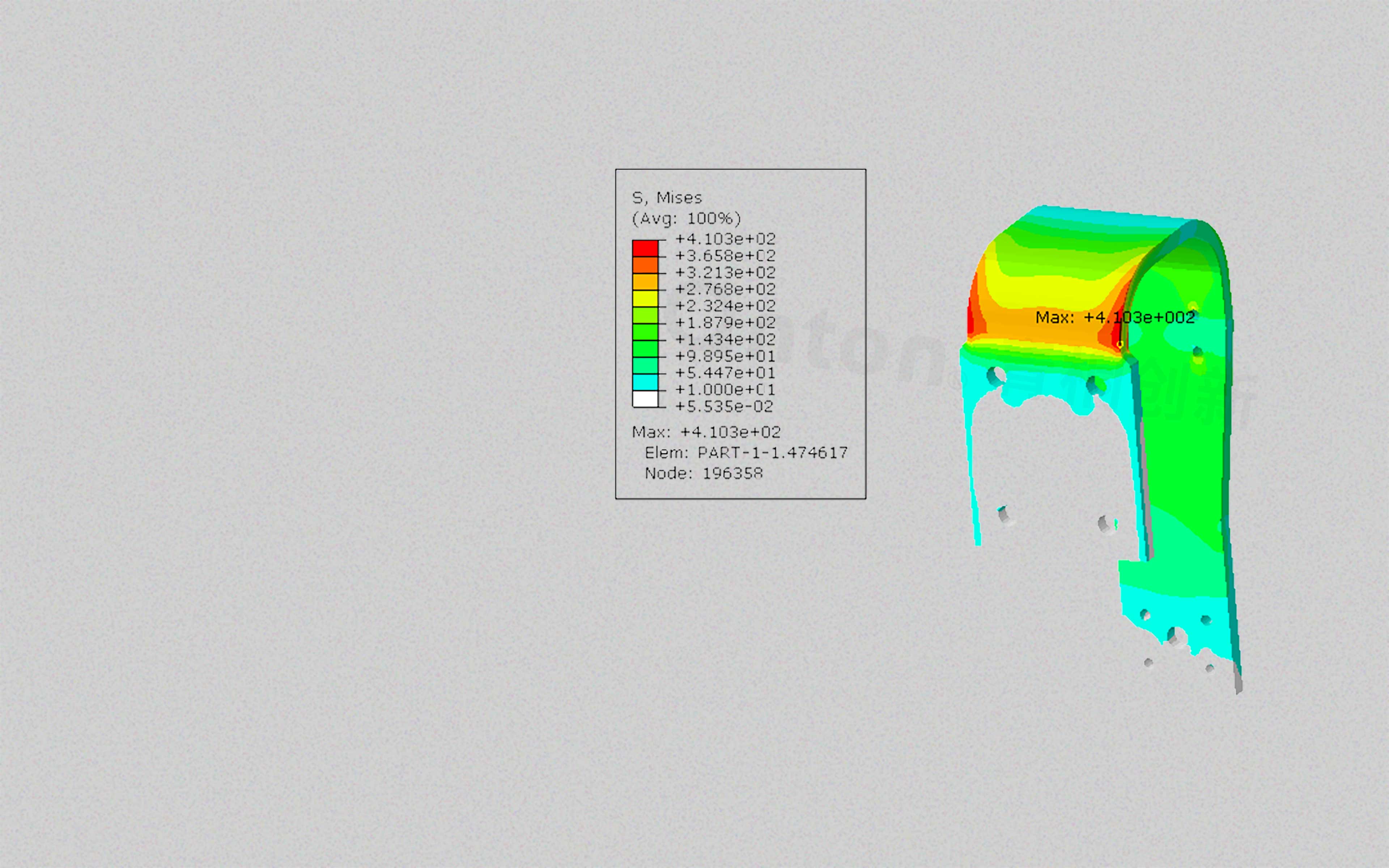
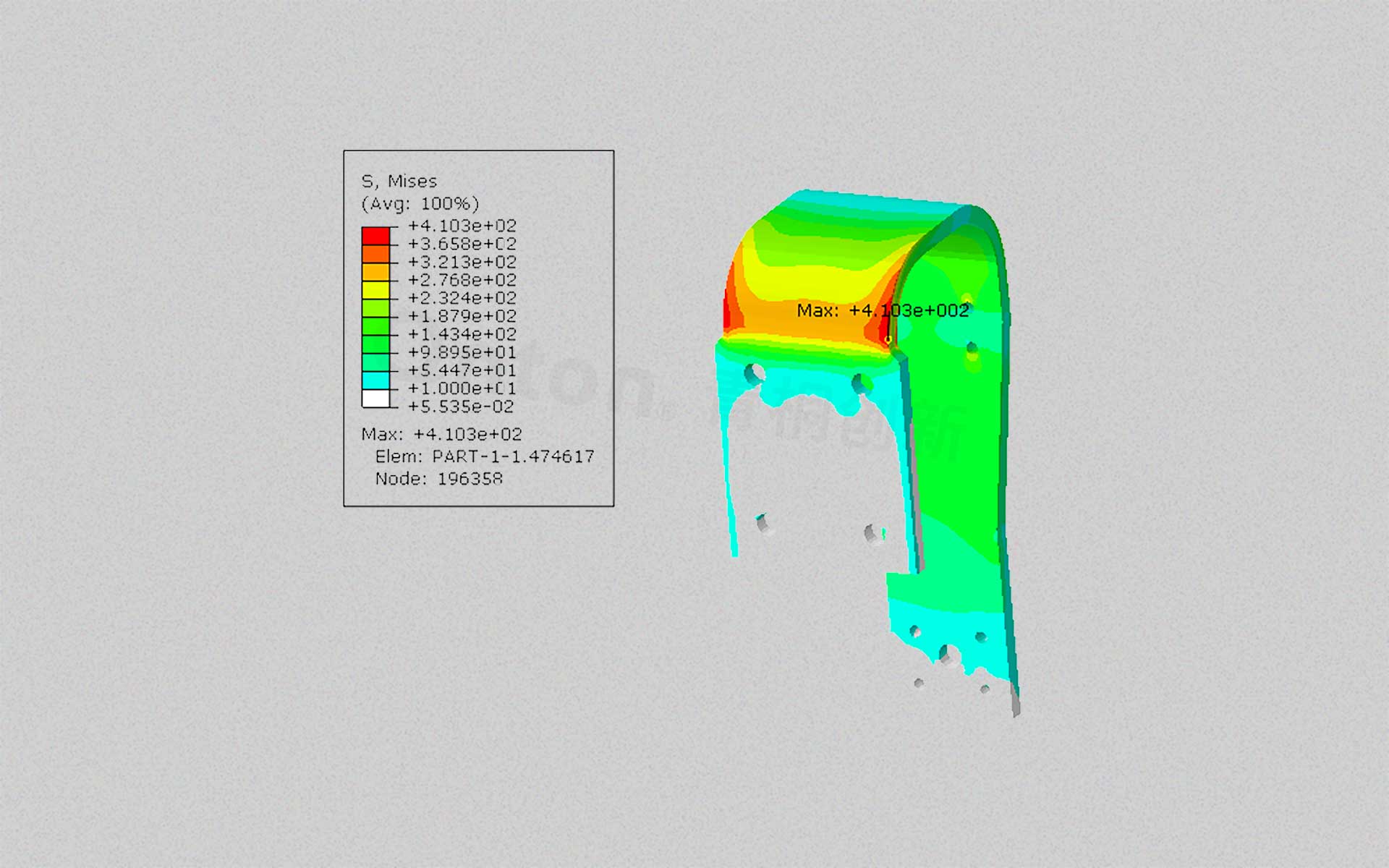
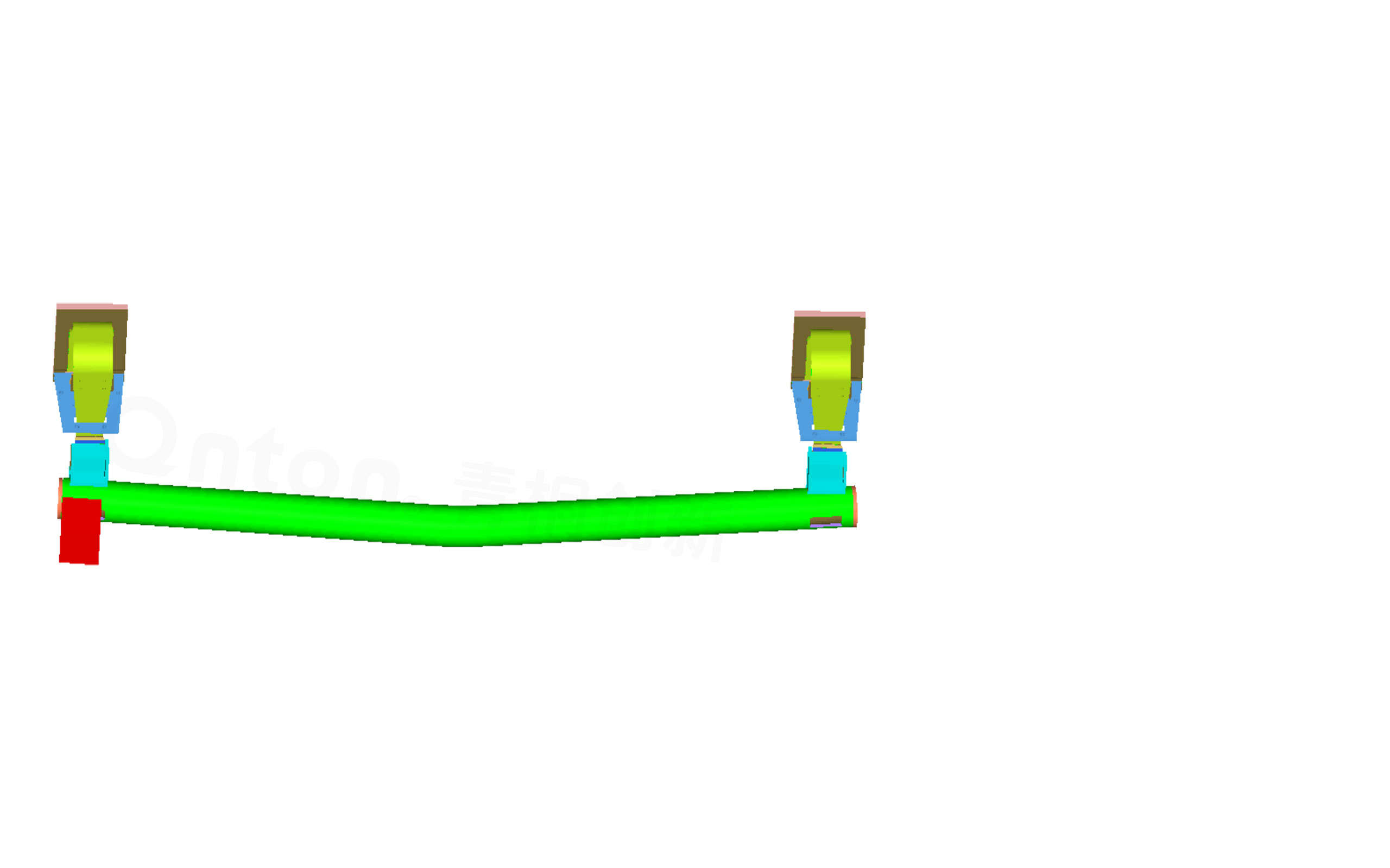
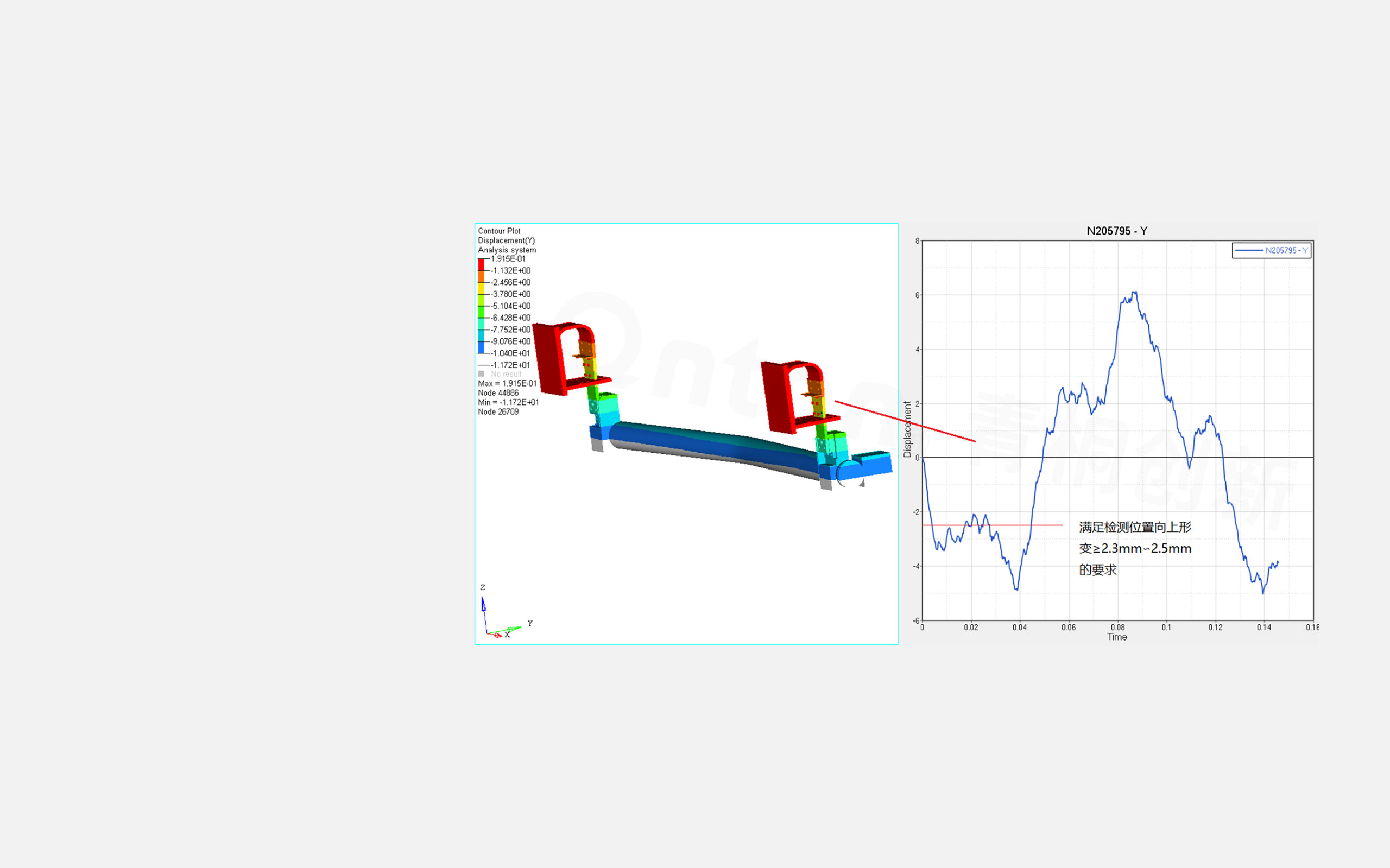
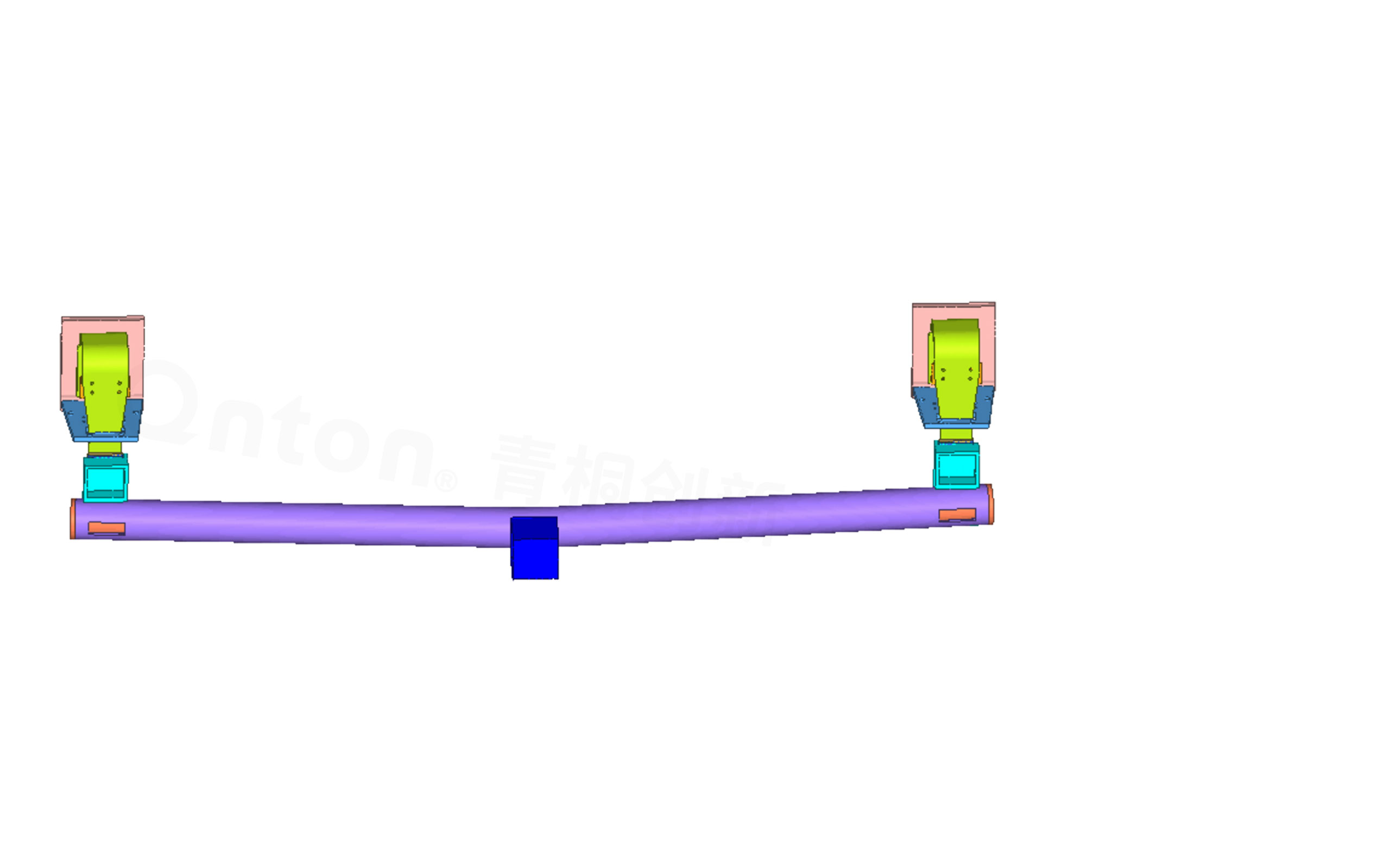
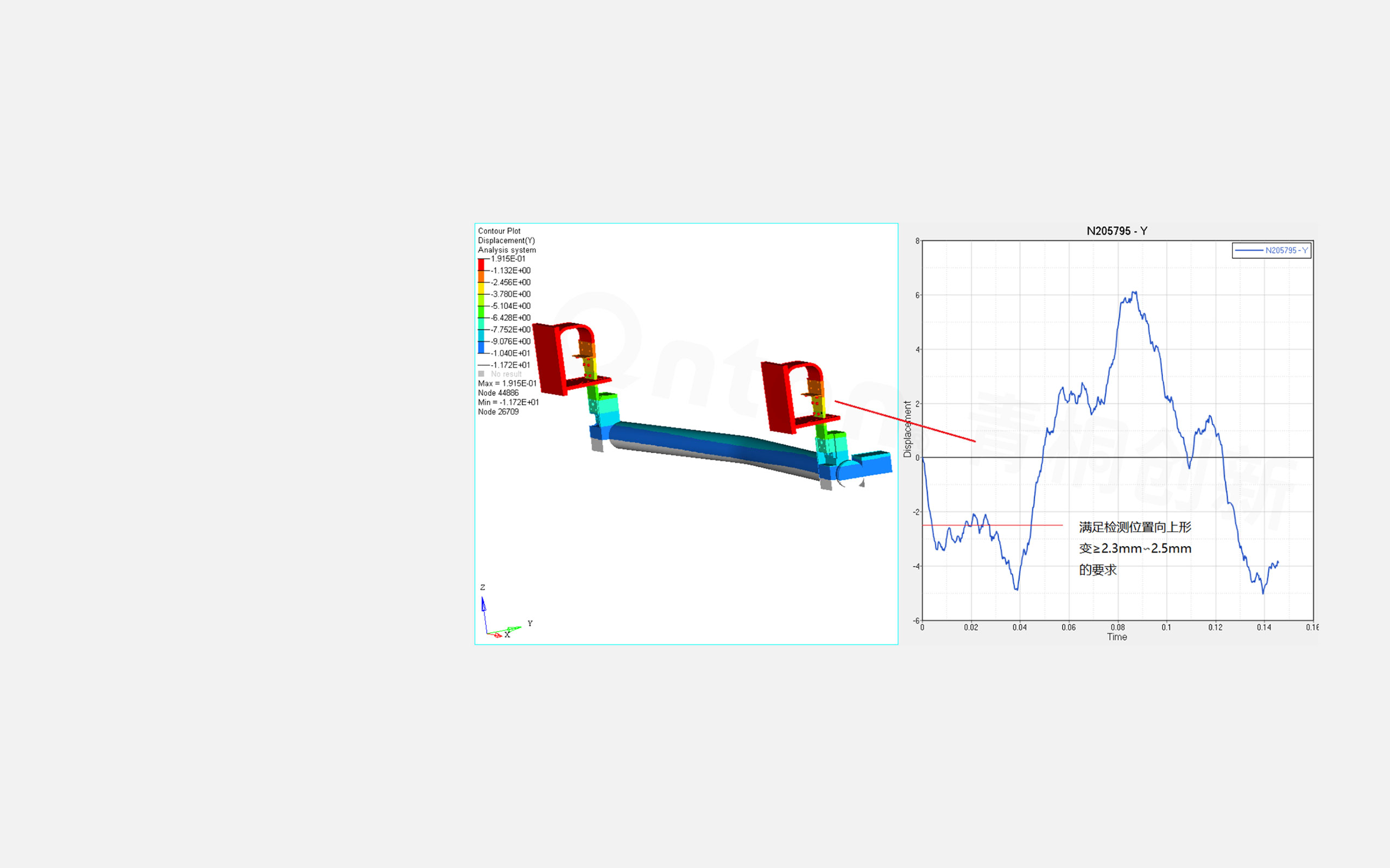
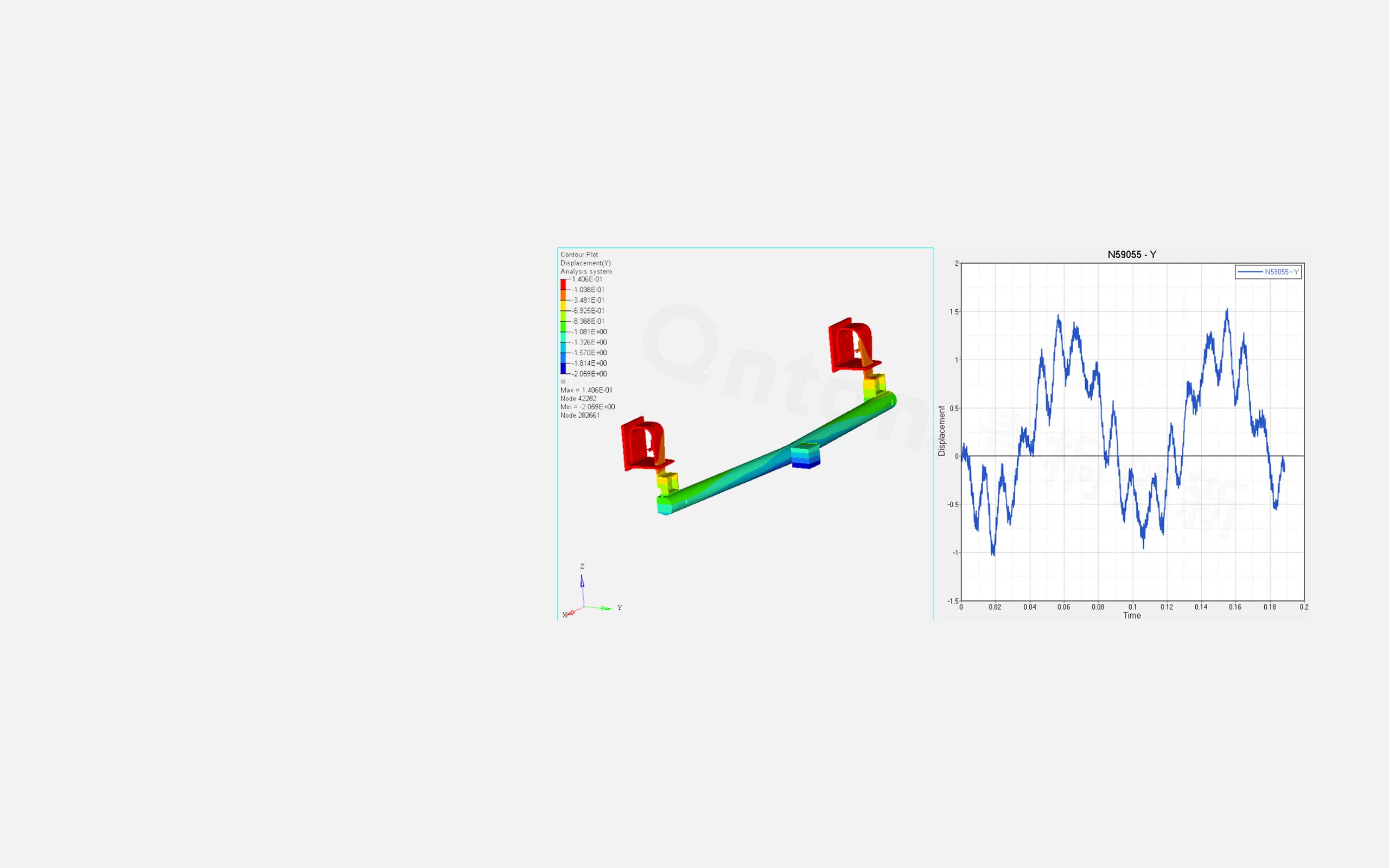
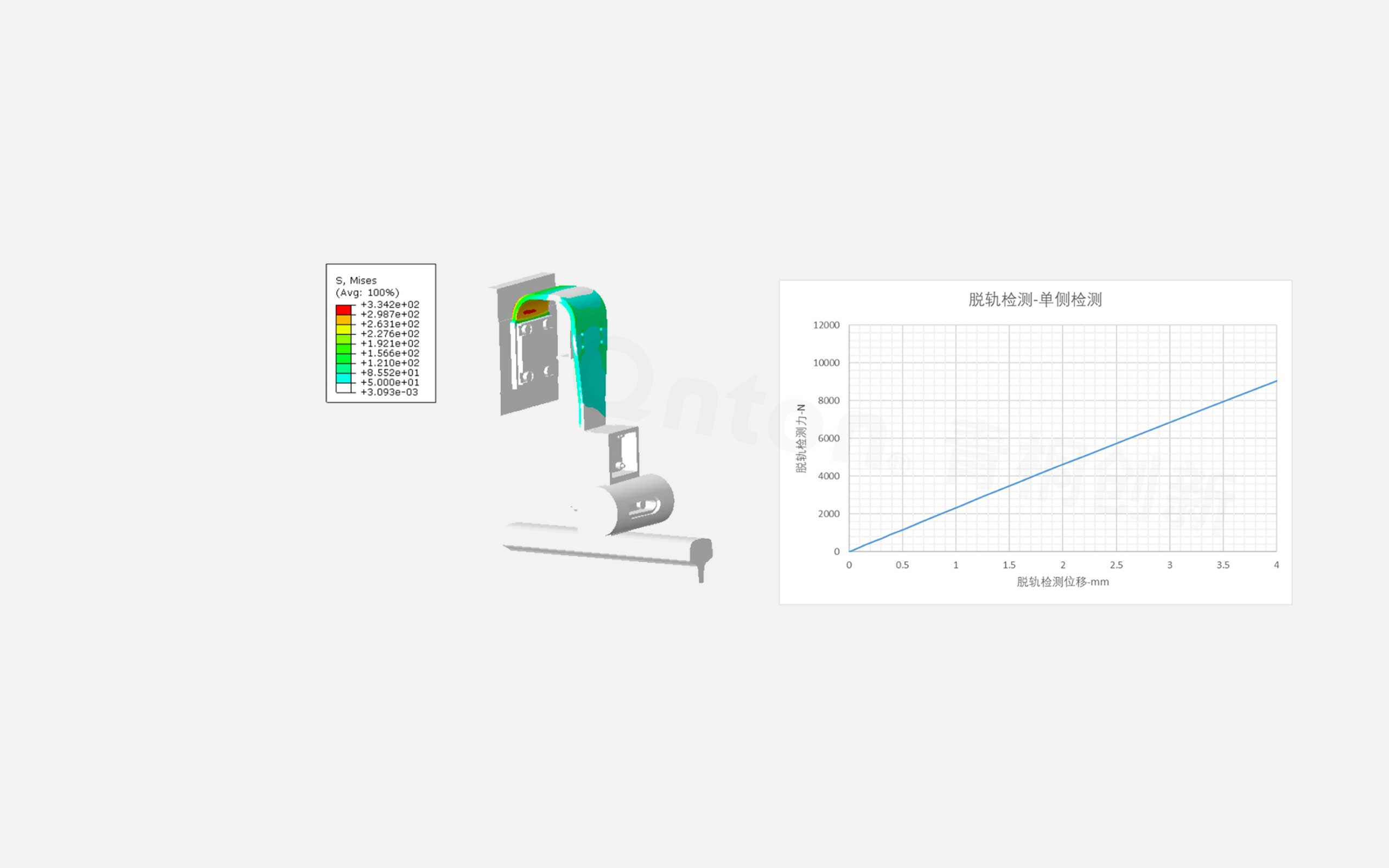
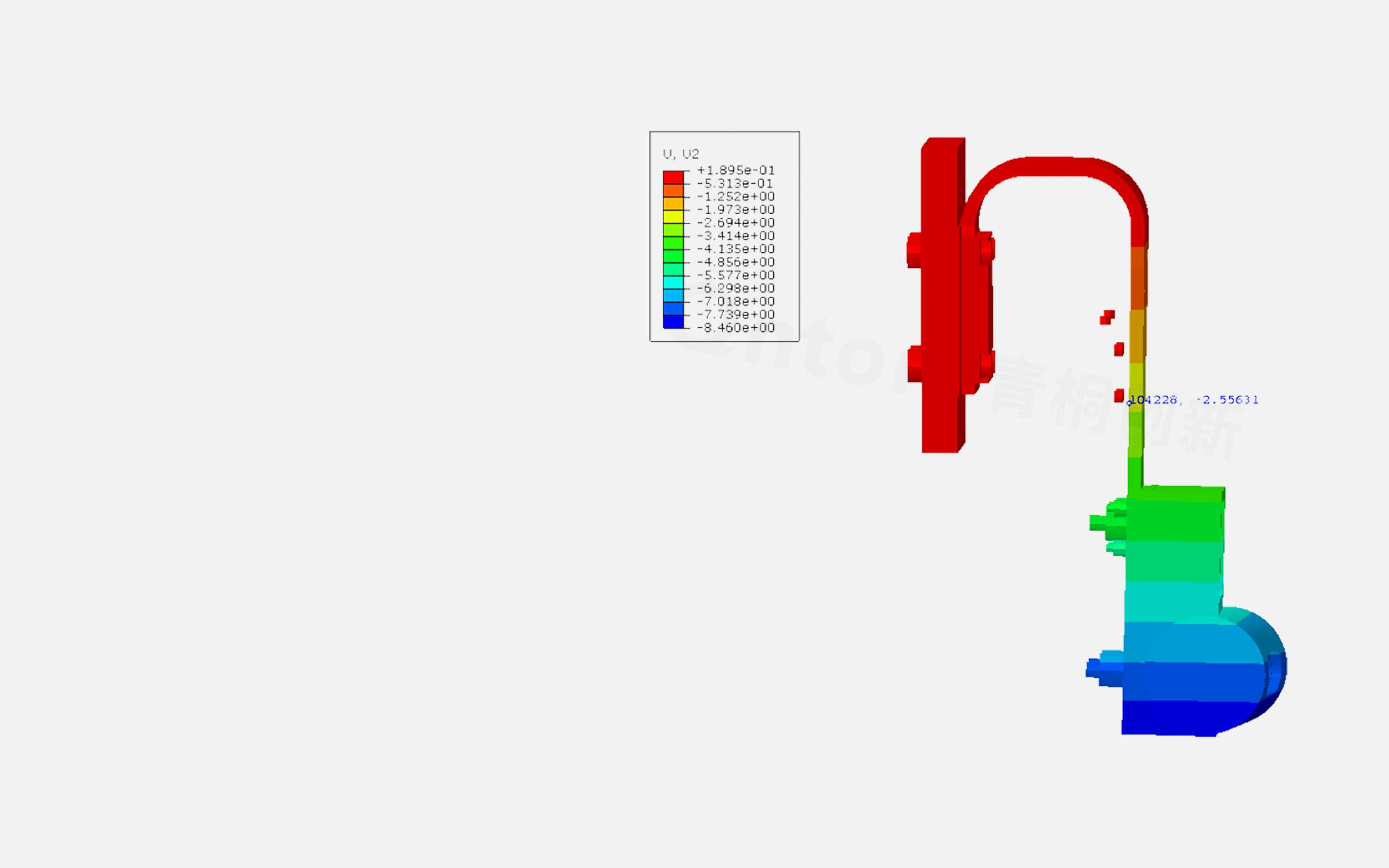
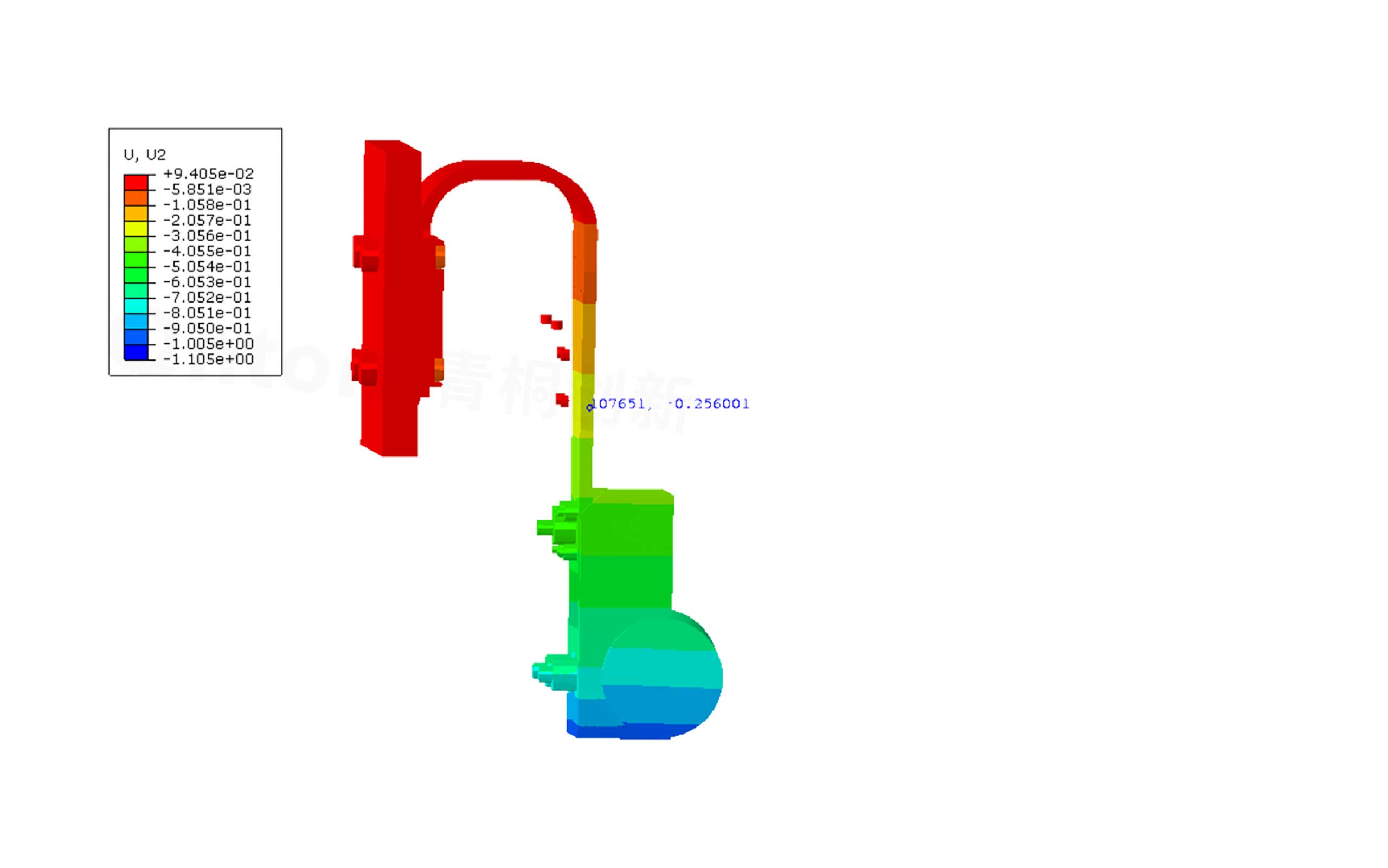
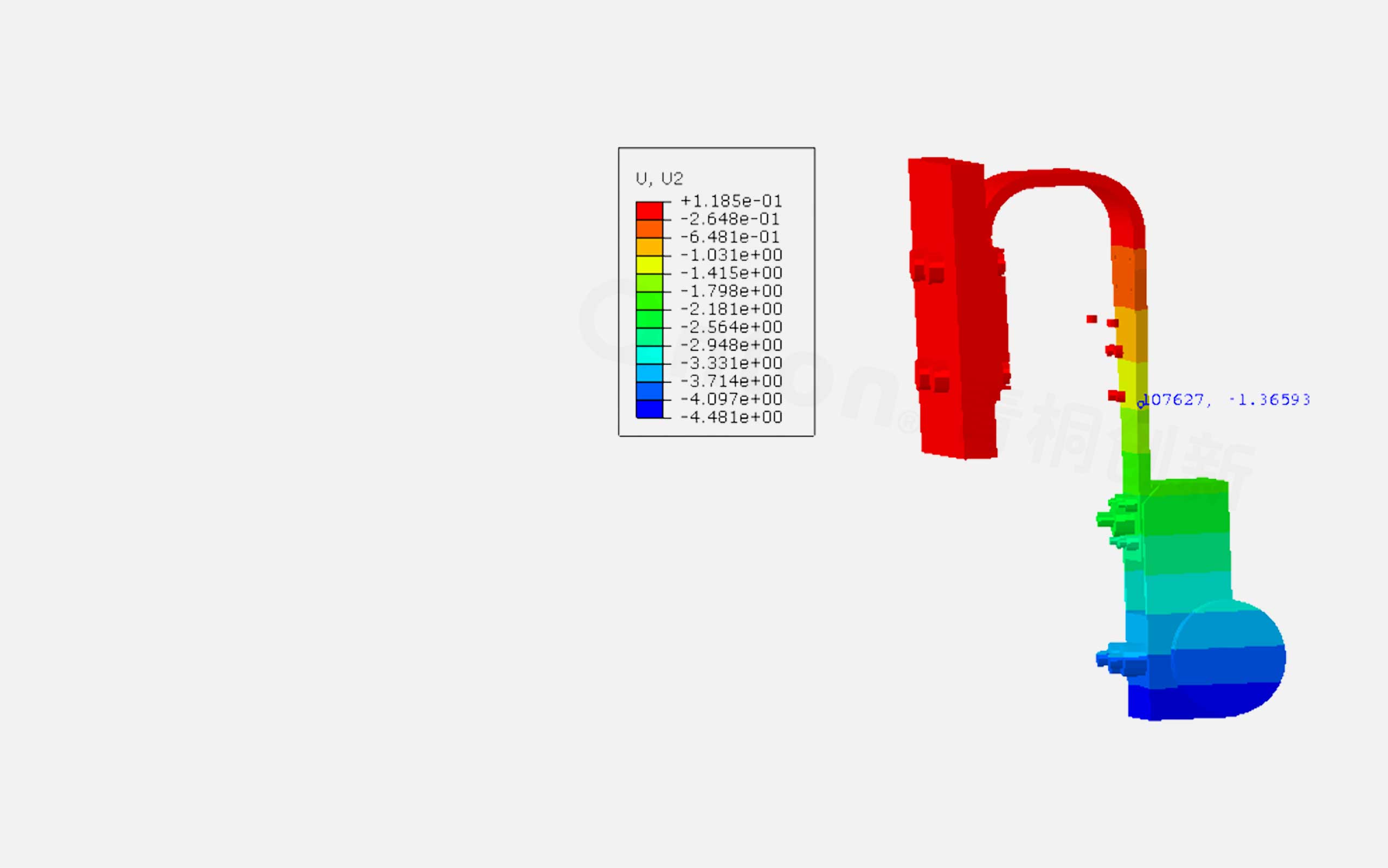
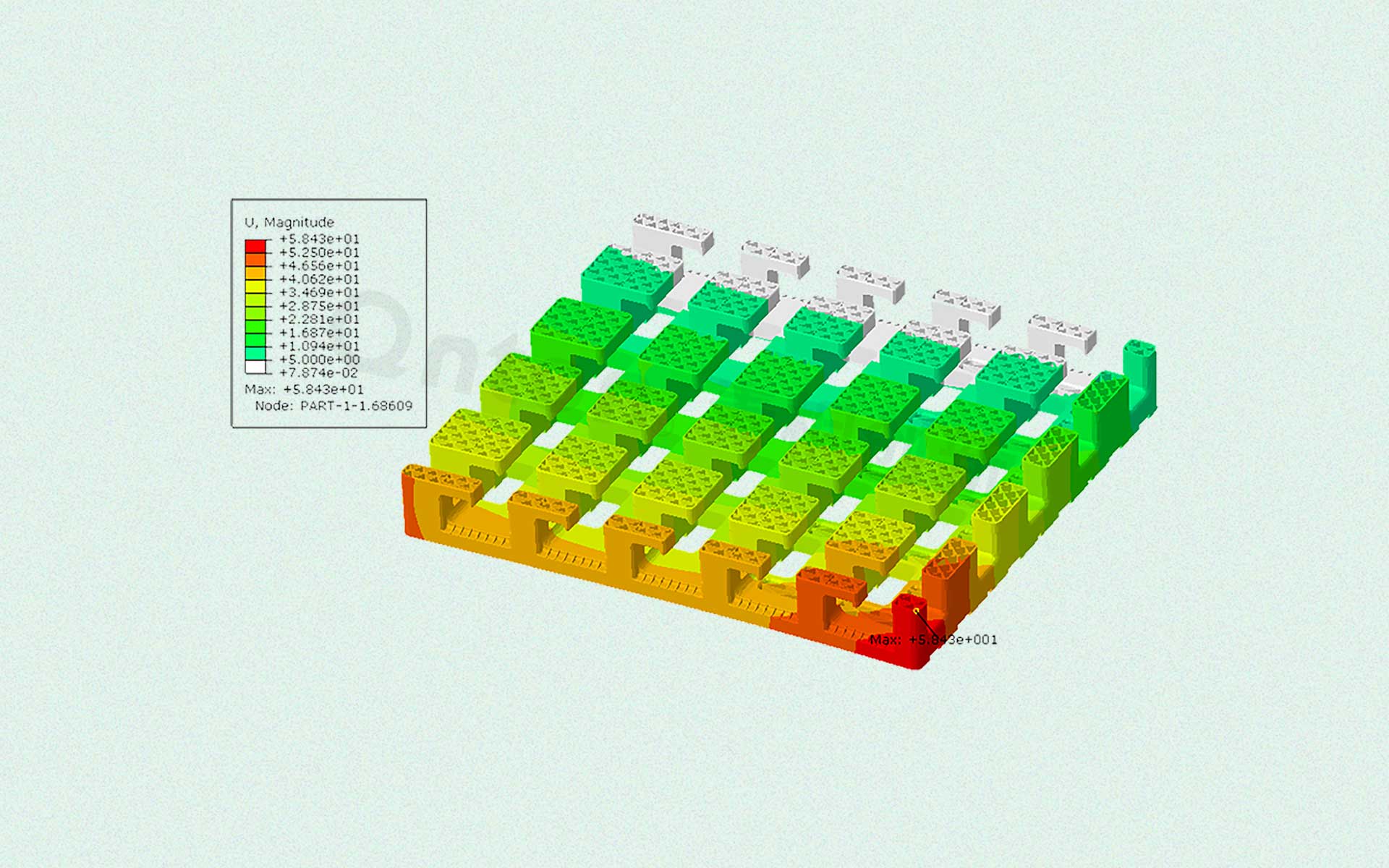
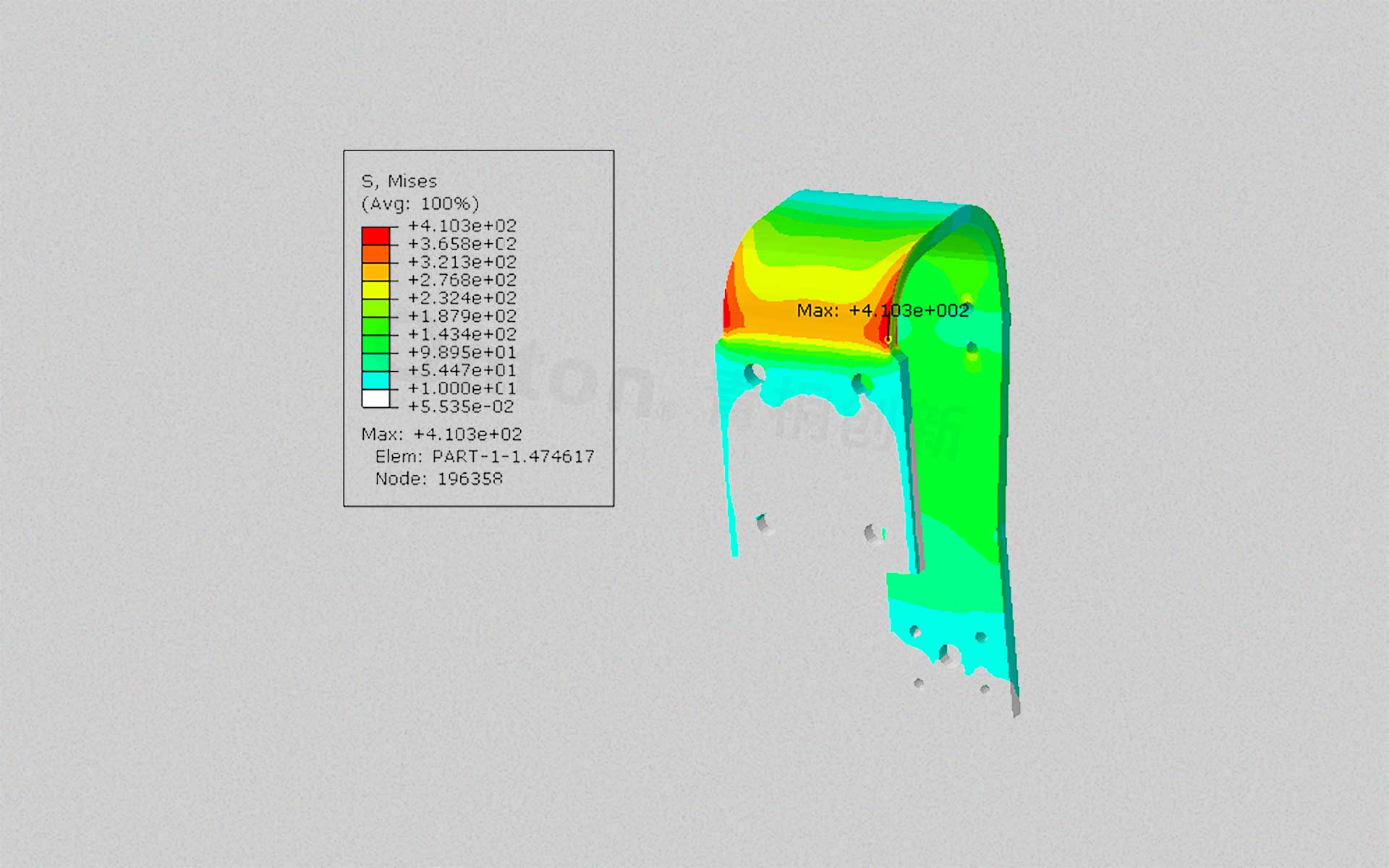
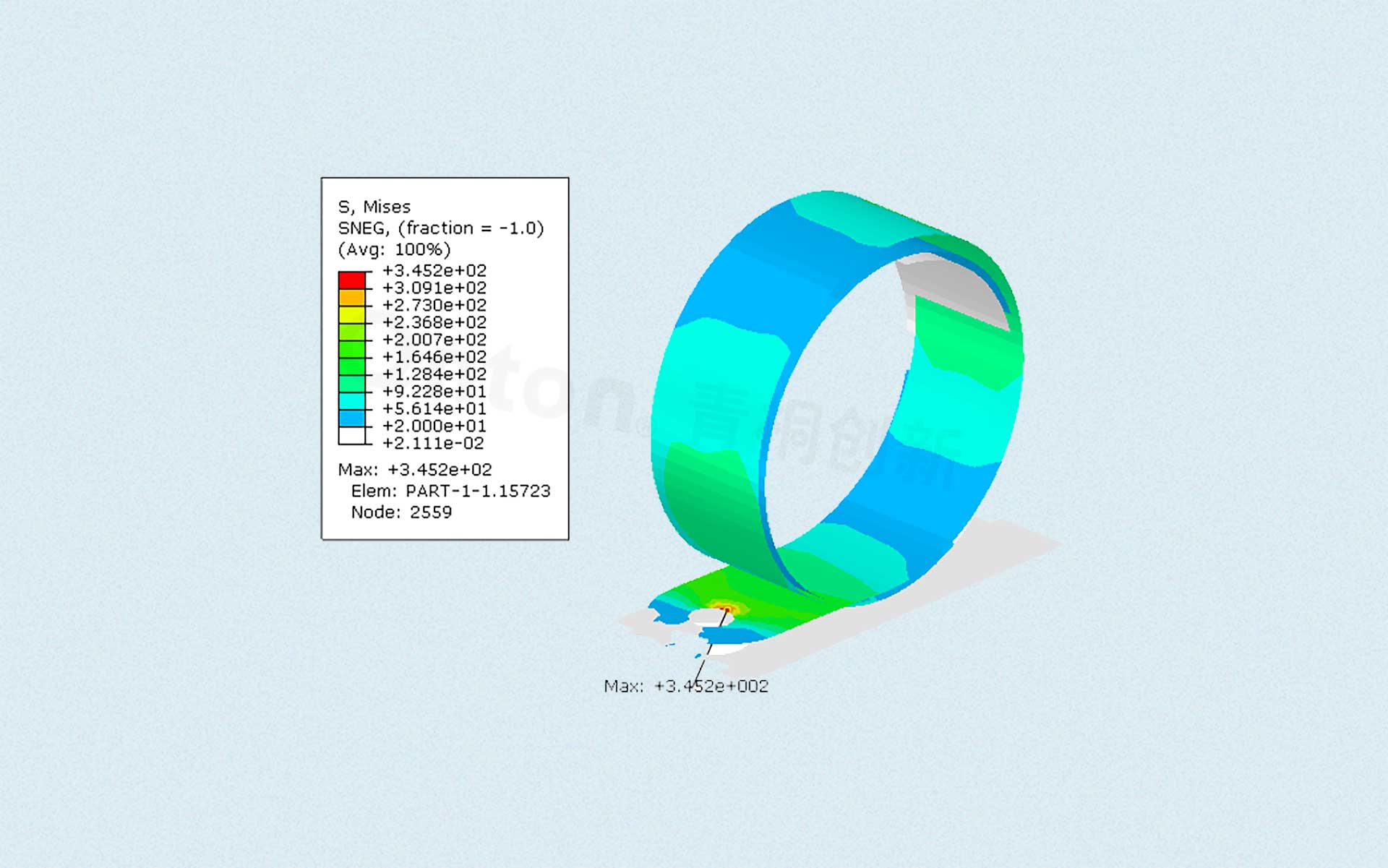
根据客户要求,碰撞检测装置按照以下方面分析:1、障碍物检测功能模拟;2、脱轨检测功能模拟;3、防误判功能检测模拟;4、机械强度校核;5、振动冲击校核。
障碍物碰撞检测








 联系我们
联系我们 在线客服
在线客服
